It’s possible that I shall make an ass of myself. But in that case one can always get out of it with a little dialectic. I have, of course, so worded my proposition as to be right either way (K.Marx, Letter to F.Engels on the Indian Mutiny)
Wednesday, December 24, 2025
AI/EV
Interactive cognition of self-driving: A multi-dimensional analysis model and implementation
Self-driving vehicles rely closely on interactions with humans, vehicles, and the surrounding environment. However, the interactive analysis of self-driving is impacted by multiple perception sources, heterogeneous data, and complex environments in actual scenes. Due to the above issues, we are often unclear about the behavior of self-driving vehicles, do not understand their decisions, and it is also difficult to achieve synergy with our human intentions.
Professor Nan Ma of Beijing University of Technology and her research team published a paper titled “Interactive Cognition of Self-driving: A Multi-dimensional Analysis Model and Implementation” in the 2025 issue of Research. We introduce the significance of research in the field of self-driving interactive cognition, detailing its components and underlying infrastructure. Furthermore, we demonstrate how the self-driving interactive cognition, inspired by the Wiener model, embodies intelligence in complex environments with the purpose of stressing the importance of interactive cognition in complex environments and scientifically evaluating the analysis of machine interactive cognition. Then, a multi-dimensional analysis model of self-driving interactive cognition is established based on perceptual information acquisition, multi-channel and cross-modal data registration, attention mechanism, visual recognition and understanding, as well as embodied dynamic control. Supported by the above, we build a multi-view spatio-temporal graph convolutional network (MV-STGCN) model for action recognition to realize vehicle-to-human body language interactive cognition. Most importantly, we innovatively propose a Nonlinear-CRITIC-TOPSIS-based method to analyze the interactive cognition analyses of different action recognition algorithms efficiently, such as MV-STGCN. Future self-driving vehicles are bound to demonstrate multi-channel and cross-modal intelligence perception and human-vehicle-friendly interaction, and we are committed to how to better realize the humanoid driving analysis and the embodied intelligence of self-driving vehicles. “Self-driving + Interactive cognition” could make the future vehicles become interactive wheeled robots that can be trusted and better serve human society.
Research Progress
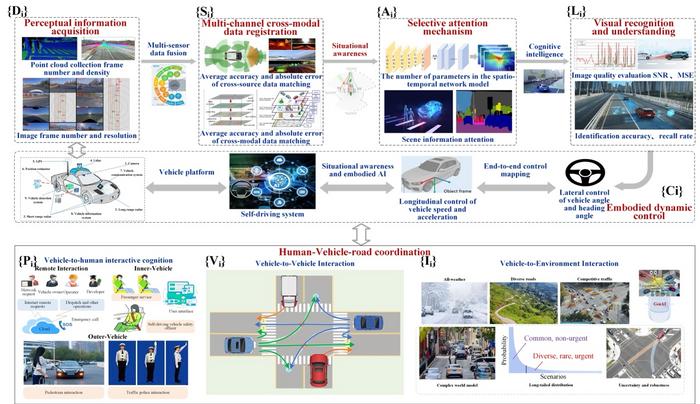
Considering vehicle's embodied intelligence as an essential basis, we first establish an analysis matrix of interactive cognition to achieve humanoid driving analysis. From the perspective of perceptual intelligence, including the following dimensions: The analysis of self-driving vehicle sensors such as cameras, radar and navigation to obtain perceptual data {Di}; The analysis of multi-channel and cross-modal data registration {Si}; The analysis of attention mechanism for perceived information {Ai}; The analysis of visual recognition and understanding {Li}. Behavioral intelligence incorporates the following dimensions: the analysis of steering, braking and acceleration of their own vehicle with embodied control {Ci}; The analysis of body language interaction between vehicles and humans {Pi}; The analysis of vehicle language interactive cognition {Vi}; The analysis of synergistic interactive cognition between vehicles and environments {Ii}, thus forming the analysis matrix of self-driving interactive cognition. According to the analysis matrix of self-driving interactive cognition, a multi-dimensional analysis model of self-driving interactive cognition is further constructed, as shown in Figure 1.
Future Prospects
In the foreseeable evolution of automotive systems, human-driven and autonomous vehicles are expected to coexist for decades. Autonomous vehicles, as mobile intelligent agents, increasingly exhibit learning capacities that extend beyond conventional computational intelligence to encompass interactive and memory intelligence, including trial-and-error learning from near-misses and accidents. We develop a multi-dimensional analysis model of self-driving interactive cognition that enables rigorous evaluation of perceptual and behavioural intelligence, with particular emphasis on learning competence. We further introduce a CRITIC–TOPSIS method based on Spearman's rank correlation coefficient to quantify multi-dimensional interactive cognitive abilities. Since 2016, our team has collaborated with several industrial and academic partners—including BAIC Research Institute, Dongfeng Yuexiang Technology, China Automotive Engineering Research Institute Co., Ltd—to advance the theory of interactive cognition for autonomous driving and to develop a suite of intelligent interaction systems. These systems support robust interaction and coordination between vehicles and humans, as well as inter-vehicle cooperation, across diverse scenes, environments, sensor modalities, and vehicle platforms, which will be essential for fostering public trust and accelerating the societal adoption of autonomous vehicles.
Interactive Cognition of Self-driving: A Multidimensional Analysis Model and Implementation
Article Publication Date
23-Dec-2025
Forecasting the impact of fully automated vehicle adoption on US road traffic injuries
JAMA Surgery
About The Study: Commercial autonomous vehicle (AV) availability and adoption are underway and could impact national road traffic injuries. In this simulation study, potential injury reductions in the U.S. were forecasted using several scenarios based on real-world data. The results of this study suggest that AV adoption may reduce expected injuries; however, predicted confidence intervals remain broad for the baseline injury forecast, and none of the scenarios reduced expected injuries outside of these bounds.
Corresponding Author: To contact the corresponding author, Avery B. Nathens, MD, MPH, PhD, email avery.nathens@sunnybrook.ca.
Editor’s Note: Please see the article for additional information, including other authors, author contributions and affiliations, conflict of interest and financial disclosures, and funding and support.
# # #
Embed this link to provide your readers free access to the full-text article
Could an electric vehicle travel from Seoul to Busan and back on a single charge? Could drivers stop worrying about battery performance even in winter? A Korean research team has taken a major step toward answering these questions by developing an anode-free lithium metal battery that can deliver nearly double driving range using the same battery volume.
A joint research team led by Professor Soojin Park and Dr. Dong-Yeob Han of the Department of Chemistry at POSTECH, together with Professor Nam-Soon Choi and Dr. Saehun Kim of KAIST, and Professor Tae Kyung Lee and researcher Junsu Son of Gyeongsang National University, has successfully achieved a volumetric energy density of 1,270 Wh/L in an anode-free lithium metal battery. This value is nearly twice that of current lithium-ion batteries used in electric vehicles, which typically deliver around 650 Wh/L. The achievement was published as a Front Cover article in Advanced Materials.
An anode-free lithium metal battery eliminates the conventional anode altogether. Instead, lithium ions stored in the cathode move during charging and deposit directly onto a copper current collector. By removing unnecessary components, more internal space can be devoted to energy storage, much like fitting more fuel into the same-sized tank. However, this design comes with serious challenges. If lithium deposits unevenly, sharp needle-like structures known as dendrites can form, increasing the risk of short circuits and potential safety hazards. Repeated charging and discharging can also damage the lithium surface, rapidly shortening battery life.
To address these issues, the research team adopted a dual strategy combining a Reversible Host (RH) and a Designed Electrolyte (DEL). The reversible host consists of a polymer framework embedded with uniformly distributed silver (Ag) nanoparticles, guiding lithium to deposit in designated locations rather than randomly. In simple terms, it acts like a dedicated parking lot for lithium, ensuring ordered and uniform deposition.
The designed electrolyte further enhances stability by forming a thin but robust protective layer composed of Li₂O and Li₃N on the lithium surface. This layer functions like a bandage on skin, preventing harmful dendrite growth while maintaining open pathways for lithium ions transport.
When combined, the RH–DEL system delivered outstanding performance. Under high areal capacity (4.6 mAh cm⁻²) and current density (2.3 mA cm⁻²), the battery retained 81.9% of its initial capacity after 100 cycles and achieved an average Coulombic efficiency of 99.6%. These results enabled the team to reach the record-breaking 1,270 Wh/L volumetric energy density in anode-free lithium metal batteries.
Importantly, this performance was validated not only in small laboratory cells but also in pouch-type batteries, which are closer to real-world electric vehicle applications. Even with a minimal amount of electrolyte (E/C = 2.5 g Ah⁻¹) and under low stack pressure (20 kPa), the batteries operated stably. This demonstrates strong potential for reducing battery weight and volume while lowering manufacturing burdens, significantly improving commercial viability.
Professor Soojin Park commented, “This work represents a meaningful breakthrough by simultaneously addressing efficiency and lifetime issues in anode-free lithium metal batteries.” Professor Tae Kyung Lee added, “Our study demonstrates that electrolyte design based on commercially available solvents can achieve both high lithium-ion mobility and interfacial stability.”
This research was supported by the Ministry of Science and ICT (MSIT) of Korea.
No comments:
Post a Comment