It’s possible that I shall make an ass of myself. But in that case one can always get out of it with a little dialectic. I have, of course, so worded my proposition as to be right either way (K.Marx, Letter to F.Engels on the Indian Mutiny)
Saturday, November 18, 2023
Porous platinum matrix shows promise as a new actuator material
NP-PT IS MADE UP OF INTERCONNECTED SMALL-DIAMETER LIGAMENTS, OR STRANDS, OF PLATINUM AS SMALL AS TWO NANOMETERS (10-9 M) IN DIAMETER WITH TINY PORES IN BETWEEN. THE SMALL NATURE OF THE PLATINUM LIGAMENTS AND THE NUMEROUS TINY PORES IMPROVE THE STRUCTURAL STABILITY OF THE MATERIAL AND ITS ENERGY CONDUCTIVITY, AS INDICATED BY THE GRAPH ILLUSTRATING CURRENT DENSITY, OR THE AMOUNT OF CHARGE FLOWING THROUGH A PARTICULAR AREA IN A GIVEN TIME, AND RELATIVE LENGTH CHANGE.
CREDIT: ENERGY MATERIALS AND DEVICES, TSINGHUA UNIVERSITY PRESS
Actuators are common machine components that convert energy into movement, like the muscles in the human body, vibrators in mobile phones or electric motors. Ideal actuator materials need good electrochemical properties to repeatedly conduct electrical currents made of flowing electrons. In addition, actuator materials require excellent mechanical properties to withstand the physical stress associated with continual movement. Nanoporous platinum (np-Pt), a platinum matrix containing tiny pores to increase energy conduction, was recently created in large quantities and in a cost-efficient manner, making np-Pt an ideal and more practical actuator material.
A group of material scientists from Hamburg University of Technology in Hamburg, Germany manufactured an ultrafine-ligament np-Pt material made up of a random, interconnected network of very fine platinum strands, or ligaments, as small as two nanometers (10-9 m) in diameter. This network also creates tiny pores between the strands, which improves the movement of electrons or charged atoms through the material. Importantly, the team used an efficient manufacturing method that decreased the cost associated with synthesizing a np-Pt. By decreasing the diameter of the Pt strands, both the surface-to-volume ratio and the mechanical stability of the np-Pt material goes up, improving the material’s actuator performance.
Compared to other nanoporous metals and materials being investigated for their potential use as actuators, the team discovered that np-Pt was physically more robust and would likely work well as a sensor or detector material versus other nanoporous materials that are too fragile.
“The fine ligament size of np-Pt could provide an enhanced surface area which makes the material a promising… catalyst of chemical reactions as well as an actuator material,” said Haonan Sun, first author of the paper and researcher in the Research Group of Integrated Metallic Nanomaterials Systems at Hamburg University of Technology. As a catalyst, np-Pt would speed the rate of specific chemical reactions.
What was most unique about the study was how the researchers manufactured the np-Pt material. “The main breakthrough in this research is that we obtained bulk np-Pt by electrochemical dealloying. Past studies on np-Pt were all based on nanoparticles or films that were prepared using more expensive commercial Pt particles. So the easy and cheap method of dealloying increases the practicality of np-Pt and makes further research possible,” said Sun.
Specifically, dealloying is a process of selective leaching or corrosion where one component of an alloy, or material blend, is selectively removed from the material. Before the dealloying process, the material is a uniform blend. After the selective leaching process, the more chemically active of the blended materials is partially removed from the material, leaving tiny pores behind. In this case, np-Pt was manufactured by selectively leaching copper from a platinum-copper alloy (Pt15Cu85) using sulfuric acid (H2SO4).
Prior to this study, np-Pt had also never been manufactured in larger bulk quantities. The research team suggests that the successful performance of bulk np-Pt serves as a model for the development of other nanoporous metals that may be investigated for their suitability as potential actuator materials, strain sensors or chemical reaction catalysts.
With the actuator material performance of np-Pt established, the team looks forward to determining the effects of the material on chemical reactions. “The next step of this study is to investigate the chemical catalyst property of our np-Pt. We have already found some very interesting phenomena with bulk np-Pt on the oxygen reduction reaction which combines oxygen and hydrogen to form water… and we would like to do some deeper research on that,” said Sun.
Other contributors include Yizhou Huang from the Research Group of Integrated Metallic Nanomaterials Systems at Hamburg University of Technology in Hamburg, Germany and Shan Shi from the Research Group of Integrated Metallic Nanomaterials Systems at Hamburg University of Technology and the Institute of Materials Mechanics at Helmholtz-Zentrum Hereon in Geesthacht, Germany.
Energy Materials and Devices is launched by Tsinghua University, published quarterly by Tsinghua University Press, aiming at being an international, single-blind peer-reviewed, open-access and interdisciplinary journal in the cutting-edge field of energy materials and devices. It focuses on the innovation research of the whole chain of basic research, technological innovation, achievement transformation and industrialization in the field of energy materials and devices, and publishes original, leading and forward-looking research results, including but not limited to the materials design, synthesis, integration, assembly and characterization of devices for energy storage and conversion etc.
SciOpen is a professional open access resource for discovery of scientific and technical content published by the Tsinghua University Press and its publishing partners, providing the scholarly publishing community with innovative technology and market-leading capabilities. SciOpen provides end-to-end services across manuscript submission, peer review, content hosting, analytics, and identity management and expert advice to ensure each journal’s development by offering a range of options across all functions as Journal Layout, Production Services, Editorial Services, Marketing and Promotions, Online Functionality, etc. By digitalizing the publishing process, SciOpen widens the reach, deepens the impact, and accelerates the exchange of ideas.
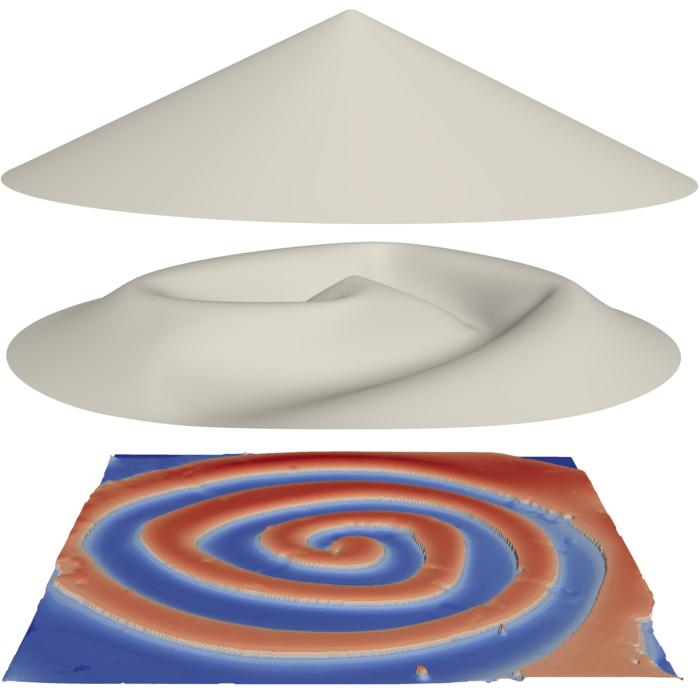
Cambridge engineers investigating the load-bearing capacity of conical shells, made from soft materials, have discovered performance-limiting weaknesses that could have implications for soft robotics – affecting the ability of morphing cones to perform fundamental mechanical tasks.
In soft robotics, components are designed to be deformable, squishable and flexible, and often use soft elements, mechanisms, machines and actuators – devices that convert energy into mechanical force – as building blocks to perform mechanical tasks. Examples of such building blocks include pieces of soft material that can grab, pull, push, pump, twist etc.
New research, led by the University of Cambridge, has calculated, for the first time, the strength of conical liquid crystal elastomer (LCE) shells. LCE is a lightweight shape-morphing material suitable for use in soft robotics.
Using a combination of theory, numerics and experiments, the researchers from Cambridge’s Department of Engineering and the University of Colorado investigated the lifting, loading and buckling of these thin, morphing LCE films that can lift thousands of times their own weight. Their findings are reported in the journal Physical Review Letters, accompanied by a synopsis in Physics Magazine.
Soft elements for use in soft robotics are often constructed from thin sheets of soft material, so their mechanical actions can be based on pure bending or stretching of the material. The former is weak; the latter is strong, as exemplified by a flat LCE sheet morphing into a cone and lifting a huge weight in the process.
Daniel Duffy, PhD student in the Department of Engineering, University of Cambridge, and co-author of the study, said: “Our work is the first to calculate and understand just how strong a thin-walled cone is. That is, of course, important for designers of soft robots that might utilise shape morphing cones as powerful actuators.”
“However, our findings expose a weakness in the strength of these thin cones, which when compressed, deform predominantly in an outer boundary layer. This then instigates buckling at much smaller loads than what has been previously predicted.”
He added: “More broadly, our work reveals some key underlying principles that we expect to generalise far beyond cones. We have discovered that free unclamped edges can vastly weaken thin structures in a surprising manner, and this can impact many mechanisms other than morphing cones, including structures that are not anything to do with soft robotics.”
No comments:
Post a Comment