By Ben Coxworth
September 24, 2021
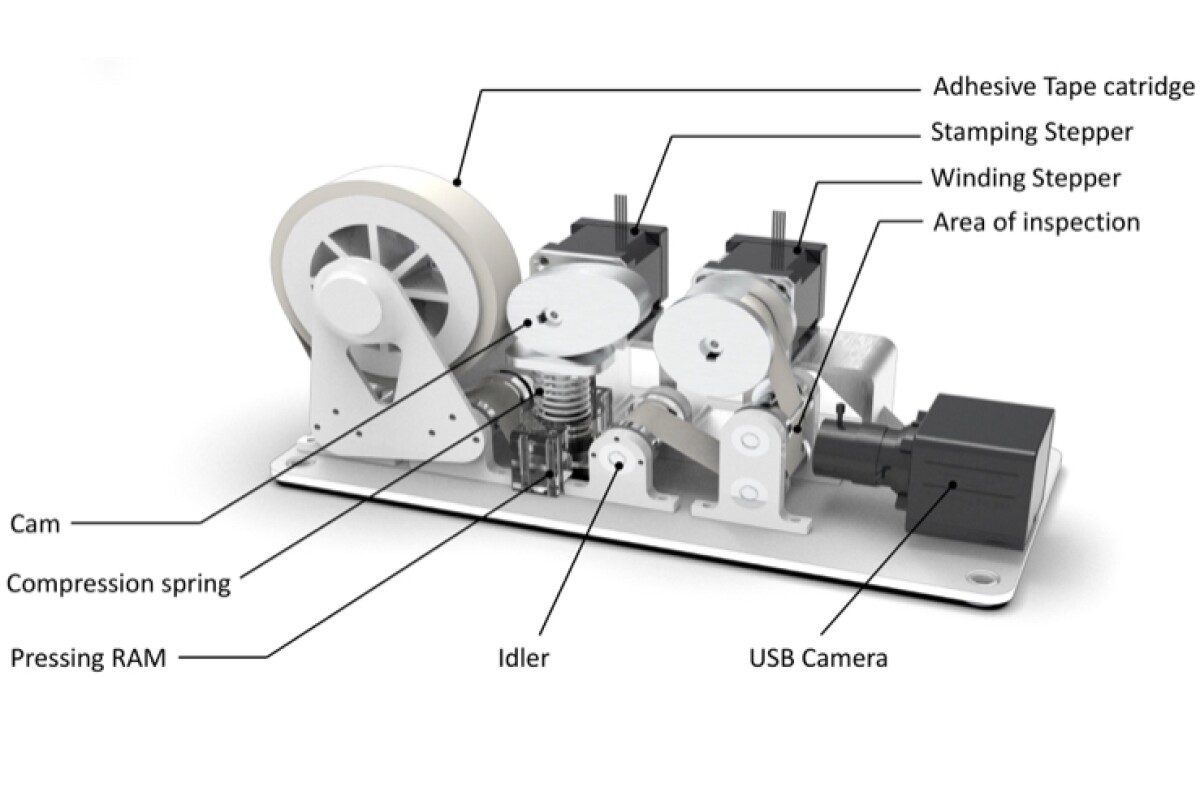
A diagram of the module
Singapore University of Technology and Design
Increasingly, robots are being used to autonomously clean floors and other surfaces in places like airports and hospitals. You have to wonder, though … how do they know when a floor is sufficiently clean? A new module could soon tell them.
Currently in development at the Singapore University of Technology and Design, the unit includes a roll of white adhesive tape, a stepper motor which pulls out short lengths of that tape, a motorized spring-loaded "plunger" of sorts that presses down on the pulled tape, and a USB camera for visually examining the tape.
A robot utilizing the device starts by imaging a length of the tape in its clean, unused state. That same section of tape is subsequently pressed against the floor (sticky side down), then examined once again via the camera. By counting the number of pixels in which dirt particles are now visible (but that weren't there previously) the robot is able to assign a "dirt score" to that area of floor.
The bot can then clean and reassess that area repeatedly, until its score is satisfactory – the scoring scale ranges from 0 to 100, with 0 being the dirtiest and 100 being the cleanest.
There are some limitations that still need to be addressed, though. For one thing, floors with coarse textures tend to retain dirt particles, keeping them from sticking to the tape. The system may also falsely detect dirt when transitioning between sections of floor with different textures.
Down the road, it is hoped that the module will additionally be able to assess microbial density, so the robot will know whether or not the floor needs to be sterilized. The scientists are also developing algorithms that would allow cleaning robots to visually identify which areas of a floor are likely to be dirtiest, so they can receive the most attention.
A paper on the research, which is being led by PhD student Thejus Pathmakumar, was recently published in the journal Sensors.
No comments:
Post a Comment